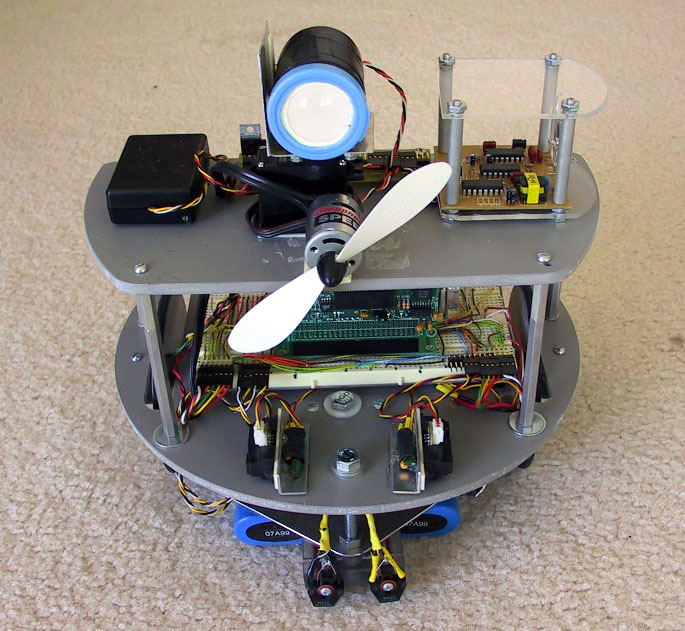
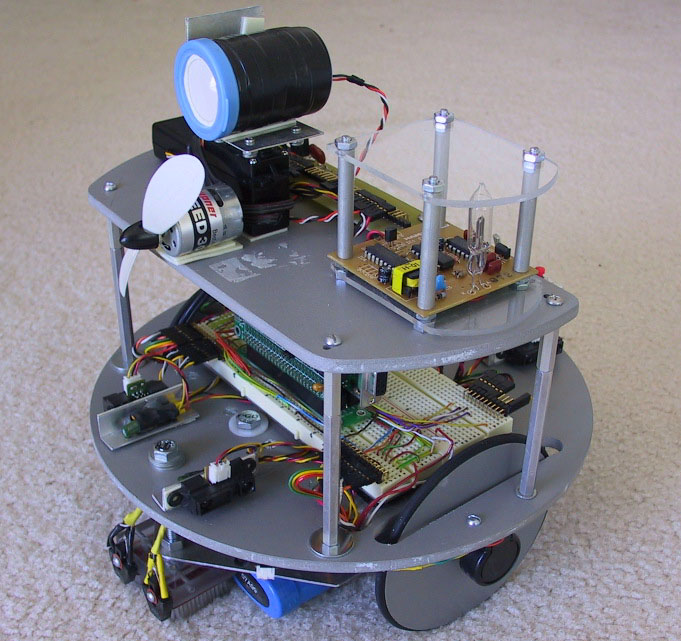
Snuffy the Shamfire Slayer
(Click pictures to enlarge)
Snuffy was built to enter the Trinity College Firefighting contest on April 22, 2001. Click here to see how he did.
I first attended the Trinity contest in 2000 and decided right away to enter for 2001. As I started to design the robot, it became clear that a lot of what I would be doing would be "re-inventing the wheel". Trinity is very much a contest environment; and as such, not many people seem to publish their designs. After all, why give away their "winning" secrets.
On the other hand, one of the objective of the contest is to advance the state of robotics. Keeping secrets doesn't help anyone advance.
I saw robots at Trinity in 2000 that did things that I never did figure out how to do. I remember one robot specifically that I videotaped. It enters a room, immediately turns toward the flame three feet away, approaches it very rapidly and stops within 12 inches of the candle WITHOUT using a white circle around the candle. Their sensing mechanism(s) were not apparent to me. I wish I knew how it worked.
I suspect that the contest will advance the state of robotics a lot faster if people publish their designs so that the next year even better and newer ideas will be necessary to win. So, I'm going to describe most of my design. I'll cover everything I learned about the commonly used sensors, how I installed them on the robot, and how I handled the data in software. I'm not going to include much (if any) actual code, but I'll try to describe the equations and algorithms used
So, I hope some of you can get a head start by using this data. I intend to build something very different for next year.
Circuits: Sensor characteristics and associated circuitry
Sensor Installation: How the sensors are installed on the robot and why.
Drive System: The motors, wheels and encoders.
Software: Algorithms used for search strategies and motor control and steering.
Control Laws: Equations for motor control and steering
Processor and Software Architecture:
NOTE: Almost all pictures included are thumbnails and can be enlarged by clicking on them.