Drive System
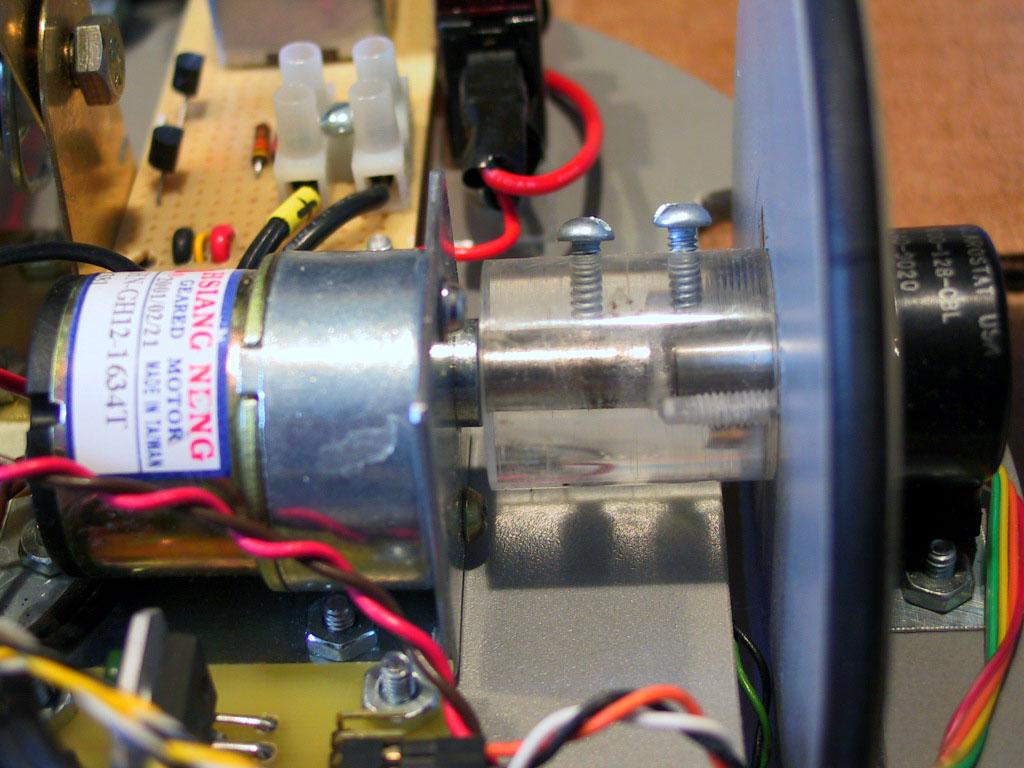
The motor drive system is pretty simple. The left and right sides are identical (although a mirror image on the mounting bracket). Each consists of a Hsaing Neng Geared Motor P/N HN GH12 16341 (available from www.jameco.com as their part number 161381. It has a no-load speed of 200 rpm and a max torque of 3.6 Kg-cm. Plenty of power for Trinity.
The wheel hub assembly was made from scratch from a piece of cylindrical plexiglass as a hub attached to a circular piece of Sintra for a wheel. A groove was put in the outer edge of the sintra to hold an O-ring as a tire. Holes were drilled through the hub to accept the motor shaft (6 mm) and the encoder shaft (0.25 inch). Holes were drilled in the side of the hub and tapped to accept setscrews to hold the motor and encoder (P/N 600CS-ND in www.digikey.com catalog) in place.
The motors were driven by LMD 18201 H bridges which I mounted to a small PC board. (if anyone wants the PCboard layout, I can send them the file for ExpressPCB).
The motors are rated at 12 vdc, and when I "upgraded" to the two NiCad batteries (which supplied about 16 vdc when fully charged), I stripped out a plastic gear in each motor. They had previously worked reliably for months at 12 vdc. Subsequently (meaning 2 new motors later), I restricted the PWM to a maximum of 75% duty cycle and didn't have any more such problems. However, as a warning, John Edwards used the same motors in his robot and stripped out the gears on several at 12 vdc.