More pictures. All thumbnails, click to enlarge
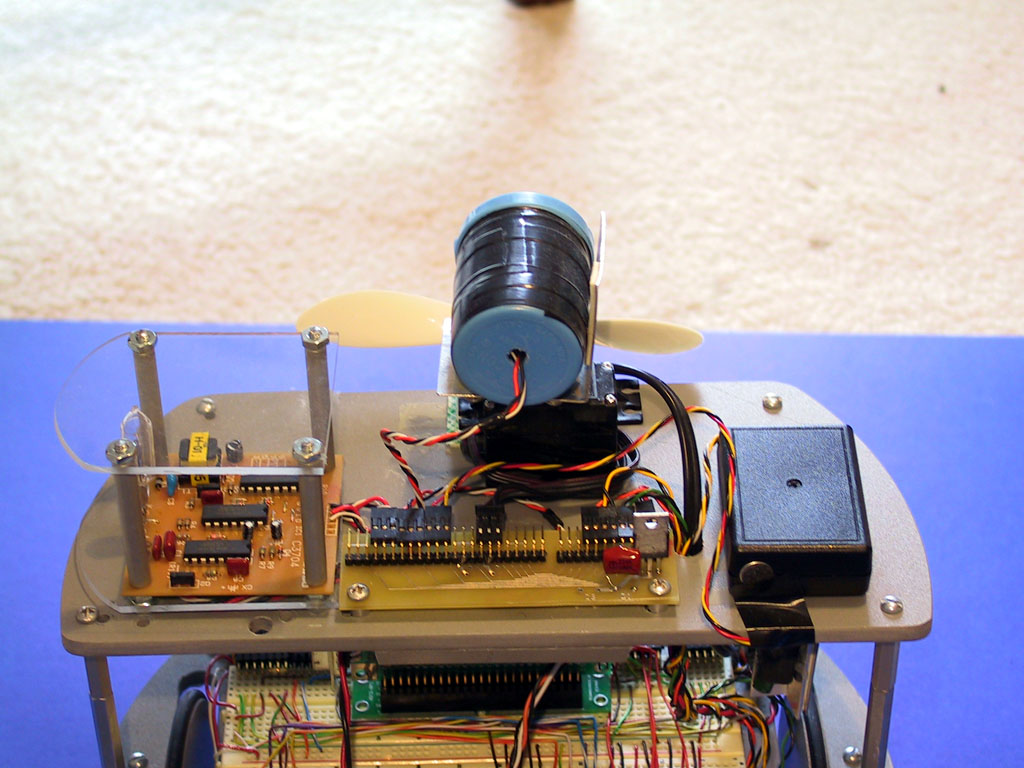
 Shows
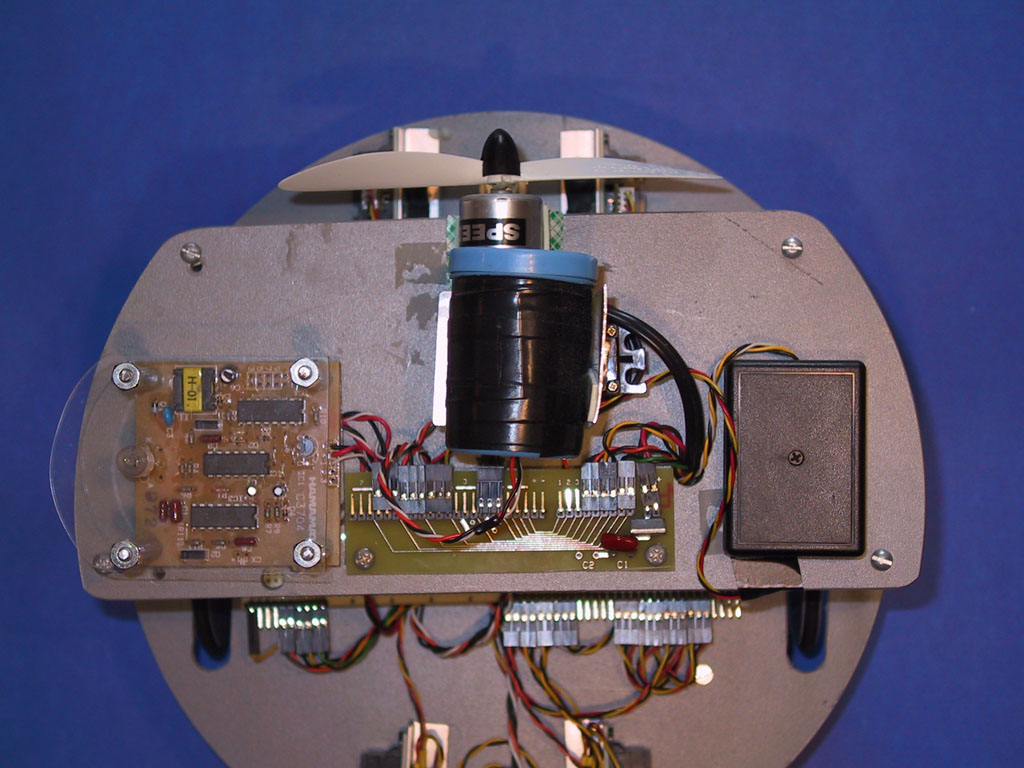
Snuffy's top deck which has the UVtron on the left, the Eltek pyrosensor
in the black/blue can in the center (mounted on a servo), the starting tone
detector in the black box on the right, the motor and propellor in the front,
and a green header PC board which just helped to minimize the wiring between the
top and bottom decks.
Shows
Snuffy's top deck which has the UVtron on the left, the Eltek pyrosensor
in the black/blue can in the center (mounted on a servo), the starting tone
detector in the black box on the right, the motor and propellor in the front,
and a green header PC board which just helped to minimize the wiring between the
top and bottom decks.
 Just
another view of the top deck, but as seen from behind.
Just
another view of the top deck, but as seen from behind.
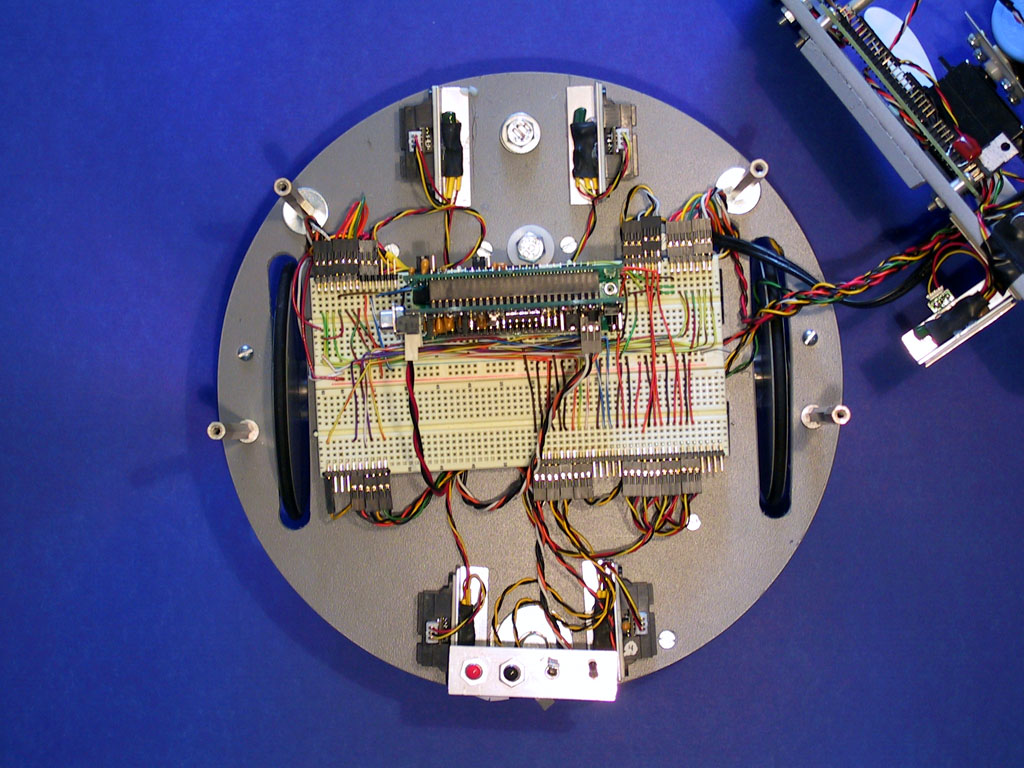
 A
view of the lower deck with the top deck set off to the side. Note the D12
IR range sensor mounted UNDER the right side of the top deck. This is the
forward looking sensor to detect upcoming walls.
A
view of the lower deck with the top deck set off to the side. Note the D12
IR range sensor mounted UNDER the right side of the top deck. This is the
forward looking sensor to detect upcoming walls.
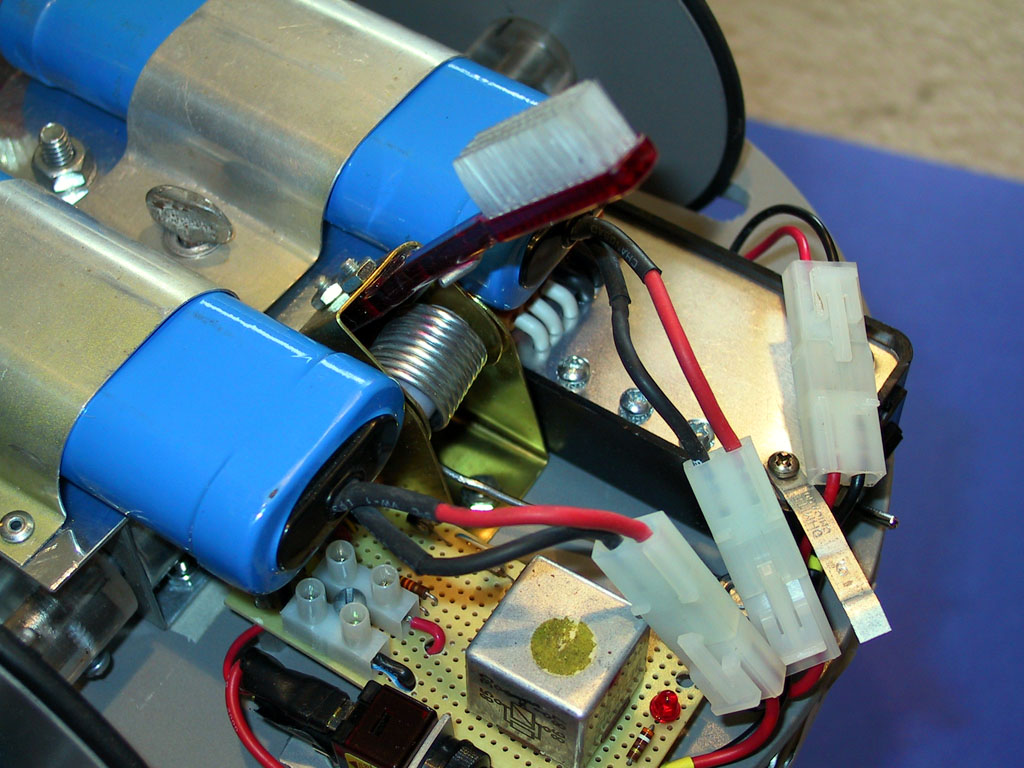
 The
bottom of the robot. Shows 2 7.2 vdc NiCad batteries mounted as low as
possible to keep the center of gravity low. The two toothbrush head
casters can be seen at the front (left) end of the robot, and a spring loaded
toothbrush head at the back to allow going over terrain irregularities (like the
non-dead reckoning ramp)
The
bottom of the robot. Shows 2 7.2 vdc NiCad batteries mounted as low as
possible to keep the center of gravity low. The two toothbrush head
casters can be seen at the front (left) end of the robot, and a spring loaded
toothbrush head at the back to allow going over terrain irregularities (like the
non-dead reckoning ramp)
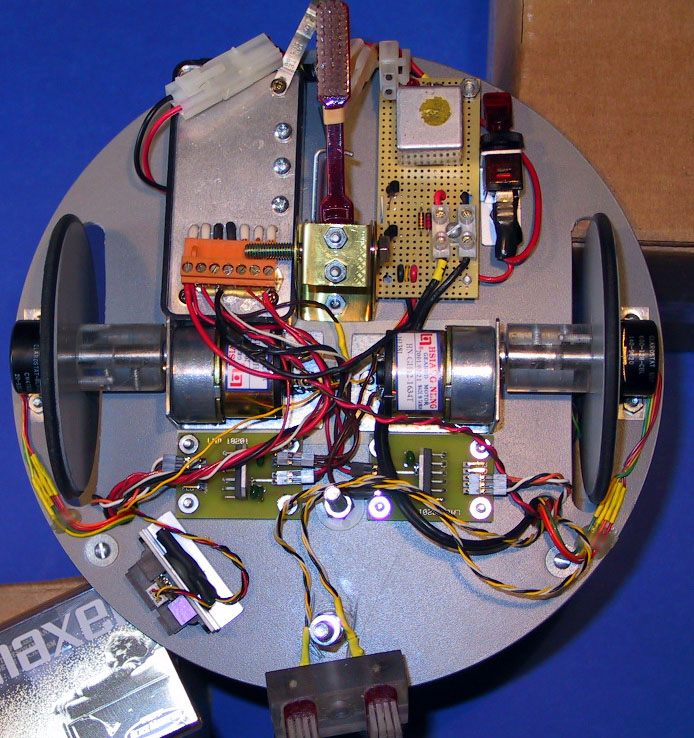
 Bottom
with the battery carrier removed. The black box with aluminum bottom in
the upper left side contains the on/off switch, a circuit breaker and a couple
of voltage regulators to generate +5 and +9 vdc. The circuit board on the
upper right is the driver for the fan motor. Next to it on the right is a switch
which just disabled power to the fan. The two circuit boards on the bottom
carry the LM18201 H Bridge chips. The D15 IR range sensor is at the lower
right side.
Bottom
with the battery carrier removed. The black box with aluminum bottom in
the upper left side contains the on/off switch, a circuit breaker and a couple
of voltage regulators to generate +5 and +9 vdc. The circuit board on the
upper right is the driver for the fan motor. Next to it on the right is a switch
which just disabled power to the fan. The two circuit boards on the bottom
carry the LM18201 H Bridge chips. The D15 IR range sensor is at the lower
right side.
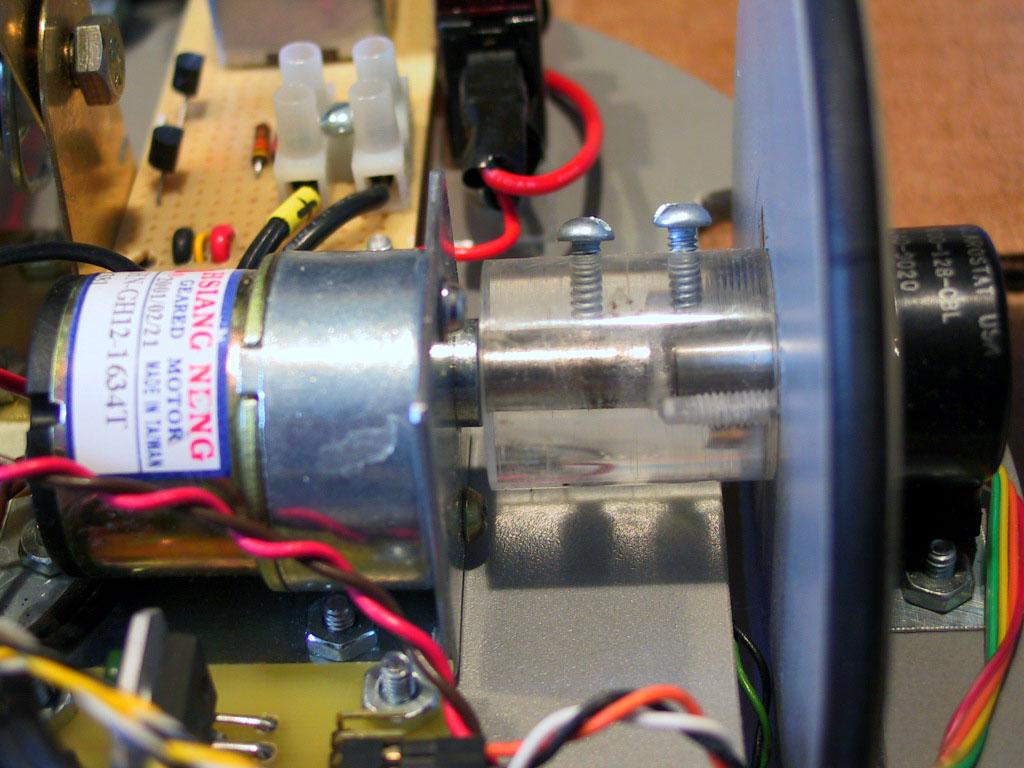
 This
shows how the motor, wheel and encoder are mounted together.
This
shows how the motor, wheel and encoder are mounted together.
 Just
another view of the bottom back which shows the spring loaded tooth brush
clearly.
Just
another view of the bottom back which shows the spring loaded tooth brush
clearly.
 Shows
Snuffy's top deck which has the UVtron on the left, the Eltek pyrosensor
in the black/blue can in the center (mounted on a servo), the starting tone
detector in the black box on the right, the motor and propellor in the front,
and a green header PC board which just helped to minimize the wiring between the
top and bottom decks.
Shows
Snuffy's top deck which has the UVtron on the left, the Eltek pyrosensor
in the black/blue can in the center (mounted on a servo), the starting tone
detector in the black box on the right, the motor and propellor in the front,
and a green header PC board which just helped to minimize the wiring between the
top and bottom decks.