CASTERS
The following data was handed out by Jim Ubersetzig at the Ebot class at the RSSC meeting of Mar 10, 2001. Some additional comments and pictures follow.
Casters for Mobile Robots by Jim Ubersetzig
RSSC Press 10 Mar 01
Most robots with three wheels have two powered wheels. By running the motors in the same direction you get forward motion. By running the motors in opposite directions, you get a turn without forward motion.
This comes at a price. To keep the robot balanced, you need a third support.
Here are the things I have used for the third support:
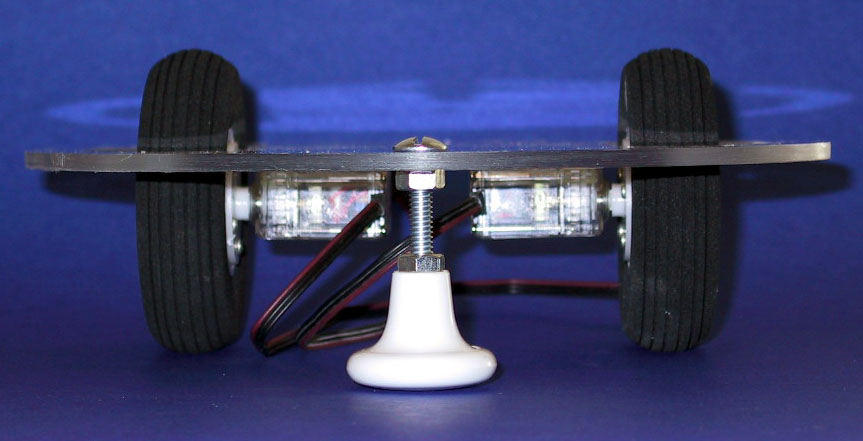
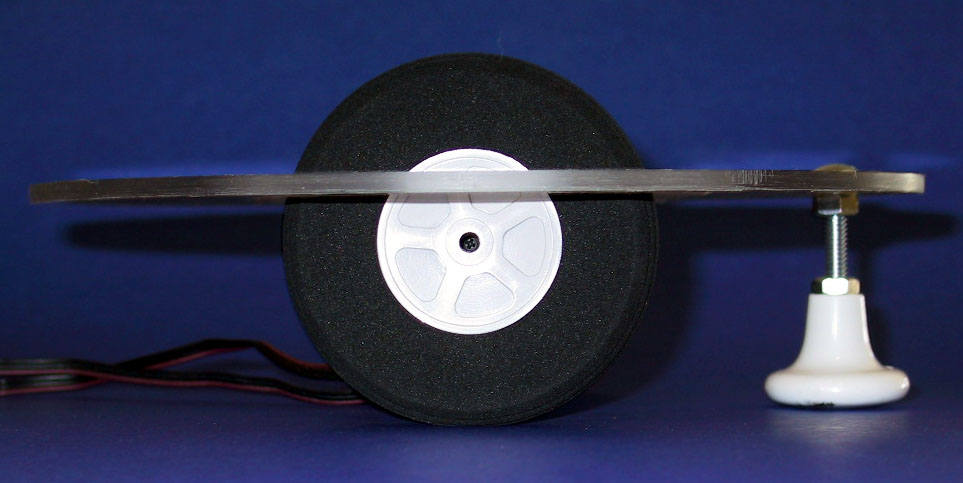
Plastic Drawer knob

cheapest solution, these slip nicely on the floor or carpet, come with a long screw which you mount vertically, and screw the knob up and down to level the robot. I used these at the front and back of the robot I demonstrated at the Nov 99 SDRS meeting.
Underarm Deodorant

cheap - some bottles of underarm deodorant have a removable ball and mount. Turn it upside down and mount it under the robot for the third support.
Ball Caster

Large hardware stores sell these, for businesses that move a lot of heavy stuff. You can get them with a large size ball. (expensive and heavy, the ball is solid steel)
Caster Wheel

Cheap, if you steal them from shopping carts, else middle priced. These come in many styles for heavy furniture, so take you pick. The large wheeled ones take up a lot of space, as they have to steer all the way around, because of the space limitations, most people use small wheeled casters.
Plastic Ball

I have good luck with a nylon or polyethylene ball - drilled through for a horizontal pin. When the robot is rolling forward, the ball rolls, when the robot turns, the ball slips. Use a plastic that is self lubicating. Polyethylene, nylon, delrin, teflon are good. Neopreme, buna N, polyurethane, and rubber are bad.
Jim Ubersetzig
Additional comments:
A brush is another form of a skid. It has what I think are a couple minor advantages: It is quieter, (no skidding sound, just a brushing sound), it has a little shock absorbing capability as the brush fibers can deflect. Even though the brush fibers may point straight down, it can still climb over obstructions as the fibers will bend backwards when an obstruction is hit. This forms a ramp which may just slip over the obstruction.
Another consideration is whether the caster should be at the front, back or both. In general, the caster should be on the end which has more weight on it. So, think ahead as to where you will be adding weight in the future.
Usually, a single caster should be located on the fore-aft center line, near the edge of the robot platform without sticking out beyond the platform. If, for any reason, you want two casters on an end, you'll probably want them equidistant from the center line.
As long as you have casters on just one end, the robot will be able to go over obstacles and climb ramps as the platform will be able to tilt while still keeping both wheels on the floor. If, you decide to put casters on both ends, you'll find that the robot tends to get stuck on obstacles and ramps because as soon as one caster lifts up, it tends to raise the wheels off the ground so they get no traction. You can add a suspension system (like a spring) to one or both casters so that it can deflect upwards allowing the wheels to keep traction. But this starts getting complicated.
About the only time you'll need casters on both ends is if you build a robot with high acceleration and deceleration speeds such that it tends to tip over in either direction when motor power is applied. This shouldn't be a problem with Ebot.
 The
caster on the left is made from two toothbrushs (mounted side by side) and glued
to a block which is then mounted to the platform.
The
caster on the left is made from two toothbrushs (mounted side by side) and glued
to a block which is then mounted to the platform.